 |
| About Bioline | All Journals | Testimonials | Membership | News |
|
||||||
|
||||||
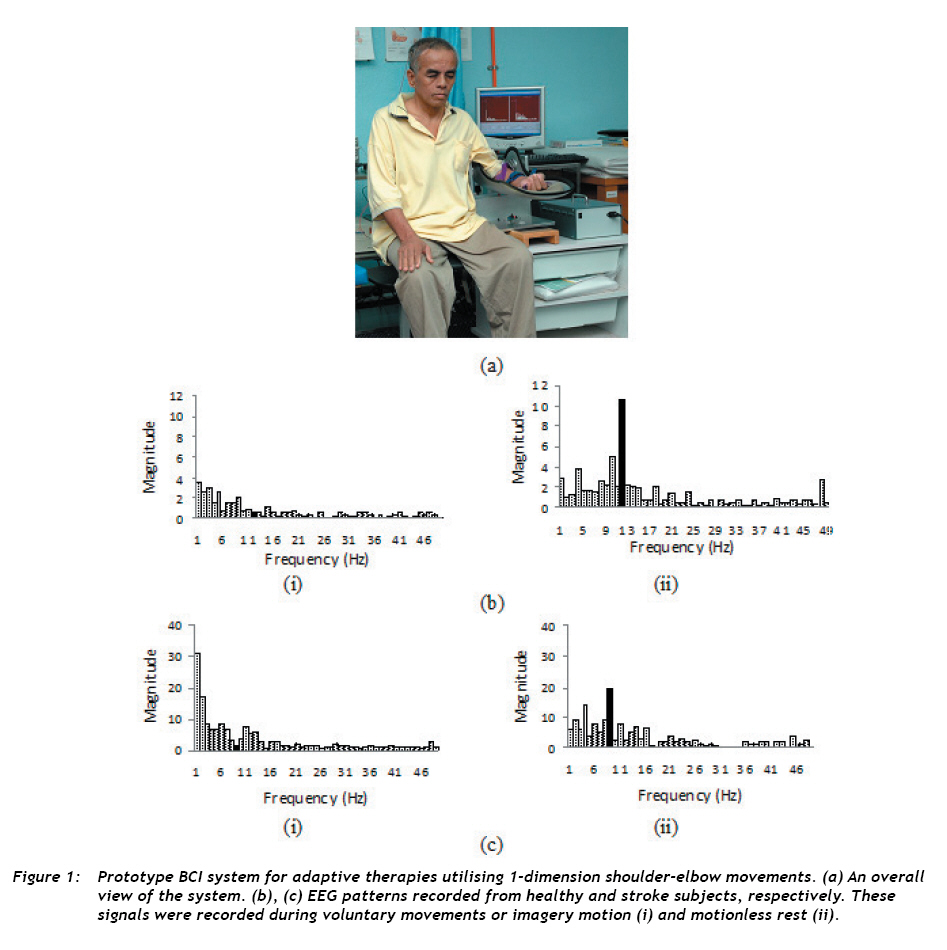
Malaysian Journal of Medical Sciences , Vol. 16, No. 2, April-Jun, 2009 pp. 1-3 EDITORIAL Neurological Rehabilitation of Stroke Patients by Means of a Robotically Assisted Brain Controlled Interface Mohd Zaid Abdullah School of Electrical and Electronic Engineering, Universiti Sains Malaysia, 14300 Engineering Campus, Penang, Malaysia Code Number: mj09009 Stroke is considered to be the single leading cause of adult disability worldwide. According to a census provided by the World Health Organization, every year, as many as 15 million people suffer from stroke. Of these, 5 million die, and another 5 million become permanently disabled. In Malaysia, there are approximately 10,000 new stroke cases each year; 70% of patients who recover stop taking part in social activities, 30% need assistance coping with daily life, and 15% die within a month (1). Stroke-related motor deficits can be rehabilitated to a greater degree than deficits resulting from other neurological disorders and traumatic brain injuries. Presently, neurological physiotherapy is the most common treatment to enhance mobility as well as sensory faculties impaired by stroke. The advent of digital technology, together with the rapid growth of signal processing techniques, has resulted in the creation of mechatronic devices that are capable of performing new rehabilitation schemes. One of the emerging technologies is the brain-computer interface (BCI) or brain-machine interface (BMI). This new computer-aided apparatus attempts to decode the brain’s electrical activities and translate them into control signals for activating external devices. Recent experiments on stroke survivors and people paralysed by spinal cord injuries and amyotrophic lateral sclerosis provide evidence that BCI promotes cortical plasticity in which the brain reorganises around damaged cortical areas, thereby recovering the functions of those areas (2). It has also been reported that the combination of robotic rehabilitation and BCI systems has the potential to outperform classical therapies in measuring and restoring lost motor skills (3). In any BCI system, the first step is to capture signals containing information about the patient’s intent. Among many available recording modalities, electroencephalogram (EEG) is arguably the most common and practical technique for capturing brain activity. This is because, in the electroencephalographic method, electrodes are safely and noninvasively placed on the scalp as opposed to being placed into the dura or cortical layers of the brain. The only drawback is that EEG signals are bandlimited, resulting in a limited temporal resolution and frequency range. Generally, EEG signals from the surface of the brain do not contain significant frequency content above 70 Hz. However, this does not pose a significant problem for BCI because EEG responses to imaginary motions and mental tasks are dominated by event-related synchronisation (ERS) and desynchronisation (ERD) of alpha (812 Hz) and beta waves (1825 Hz) (4). Mu-rhythms, which are closely related to cortical motor planning, falls within the alpha band. In most healthy adults, the mu-wave is attenuated whenever voluntary, passive, or reflexive movements are performed or imagined. This desynchronisation corresponds to activation of the sensorimotor areas and reflects increased cellular excitability in the brain during cortical information processing. In contrast, the mu-rhythm (particularly the alpha component) is synchronised somatotopically when the brain is idle or at rest. As a result, the EEG amplitude increases during motionless rest. The attenuation (ERD) and amplification (ERS) of alpha waves form the basis of BCI control and machine interfaces. Thus, a severely paralysed patient can use mu-rhythms to move a cursor on a computer screen or establish simple communication like “yes” or “no” answers. This strategy is relatively straightforward and has already been the focus of a considerable body of research. The more complex task is to use these signals that allow a disabled person to communicate and translate them into actions that reflect his or her intent. This strategy is based on the hypothesis that repeated activation and deactivation of brain signals restores motor function and induces brain plasticity (2). To test this hypothesis, it is necessary to have a controlled environment in which the patient attempts to perform a specific imagery motion while a robotic arm provides control and aids completion of the motion. This has been the model for the design and construction of the BCI-assisted robotic arm system for rehabilitation of stroke survivors. Figure 1(a) shows a class 3 stroke patient with EEG probes attached to the cortical areas of the scalp, using the robotic arm. The basic goal of the design is to capture alpha waves as accurately as possible while minimising noise, especially artefacts due to electromyographic muscle movement and other environmental interference. With this goal in mind, we designed the 10th order Sallen-Key band-pass filter, which filters out unwanted components and allows only selected frequencies to pass through. The overall gain of the filter is set to 1239, and the bandwidth is fixed to 30 Hz. This design spatially attenuates unwanted noise by 60 dB while enhancing the signal-to-noise ratio by more than 100 dB. The filtered, amplified signal is sampled at 100 kHz and digitised using a 12-bit analogue-to-digital (A/D) converter. The signal is then fast Fourier transformed to produce a power spectral distribution of the signal. Altogether, four EEG probes are used in the experiments comprising a healthy subject and a stroke patient. Figure 1(b) and (c) show spectra recorded from channels corresponding to a healthy subject and a stroke subject, respectively. In these figures, (i) indicates the spectrum when the subject is awake, and (ii) indicates the spectrum when the subject is at rest. Clearly, the amplitude of the mu-rhythm generally decreased when both subjects voluntarily moved their arms or performed emotion movements. However, the EEG pattern, particularly the 10 Hz alpha wave, increased remarkably when they were at rest. Expectedly, the percentage increase in amplitude was much higher in the healthy subject compared to the stroke patient. These patterns, which are associated with the voluntary and imagery modulations of the mu-rhythm, provide unique fingerprints corresponding to subjects’ motor intents. These patterns allowed us to devise a strategy for translating imagination of movements into robotic commands. The system offers a communication interface that is matched with a stroke patient’s residual motor disabilities. We believe that such a prototype could facilitate translation from pre-clinical demonstrations to clinically useful applications, indirectly proving the hypothesis that adaptive therapies promote brain plasticity. References
© Copyright 2008 - Malaysian Journal of Medical Science The following images related to this document are available:Photo images[mj09009t2.jpg] [mj09009t3.jpg] [mj09009t1.jpg] [mj09009f1.jpg] |
| |||||||||

{kind=link}